Table of Contents
Sensory and multisensory illusions
Rules of multisensory inetgration:Multisensorická integrace - pravidla (CZ)
Temporal : Visual + Tactile inducted body parts illusions
Natáhnutí prstu
Obraz je počítačově upraven tak že vypadá že se prst natáhnul zaroven se za něj mírně táhne aby se přidaly hmatové pocity
- Signály
- zrak,hmat ,propriorecepce(vnímání polohy)
- Pravidla
- pro tento úkol je duležitější zrak a zároven je synchronizován s hmatem
- časová synchronizace
- místo V a P nesedí
- Integrace
- jako základ se vezme zrak k němu se přidá hmat a propriorecepce se upravý/vypne aby vjem odpovídal zobrazené délce prstu
- Note:
- tenhle pokus výrazně snížil bolest prstu nějak ovlivnuje integraci bolesti
7C8EYMJjfiw
Rubber hand
TCQbygjG0RU sxwn1w7MJvk
The Beeblebrox illusion
This is a variant on the rubber hand illusion that creates the peculiar sensation of having three arms, a bit like Zaphod Beeblebrox in the The Hitchhiker's Guide to the Galaxy. GZDDWozq3b4
Switched hand
mCpU03Rn2DA
Mirror box and phantom limb
Mirror box invented by Vilayanur S. Ramachandran to help alleviate phantom limb pain, in which patients feel they still have a limb after having it amputated.

Phantm limb XphC6ozCnj4 (9:40-end) v8L4xPKeFSw sq6u4XVrr58 (3.15-end) PpEpj-JgGDI (to 5.30)
Temporal : Visual + Tactile whole body illusions
Body swap
rawY2VzN4-c
Body transfer
mHP2liY0oDE
Virtual OOBE
4PQAc_Z2OfQ
-xWowv7Qryc
Barbie-doll illusion
uhRbAjdEiGw
- nové tělo musí mít dostatečne humanoidní tvar a musí byt použito pohledu 1 osoby při použití pohledu 3 osoby je iluze slabši nebo žádná
- “self-recognition” effect completely disappears if one tries to induce the illusion from a 3PP without HMDs.
- this is in stark contrast to the body-swap illusion, which can be elicited without the use of video-technology, as we have demonstrated .
Pseudo-attraction force perception
The paper discusses the effect of acceleration profiles on the kinesthetic illusion of being pulled (pseudo-attraction force perception). We have found that when a hand-held object oscillates in the hands, if the acceleration pattern is lopsided, one feels a pulling force sensation, although the object does move in two opposite directions. Our previous findings indicate that the pulse frequency of a lopsided oscillation determines the effective generation of the pseudo-attraction force. The object of this study is to clarify the effect of pulse width and pulse interval on force perception at the pulse frequency. The experimental results suggest that (i) there were no significant difference between pulse widths as regards perceiving a pseudo-attraction force, and (ii) there was a depressive interaction between pulse width and pulse interval with respect to force perception.
- based on change numbness
http://doi.ieeecomputersociety.org/10.1109/ICSMC.2009.5346927 Yj_WnNWV8F4
Mislocalization - spatial tactile illusions
Tactile funnelling
Separate closely-spaced stimuli on the skin are perceived as a single, more intense stimulus at the central location This even works for just two stimuli, inducing a 'phantom' touch between the two real touches
It requires to deliver short and simultaneous vibratory signals (of the order of 5 ms) at di erent locations of the skin (spatial separation of the order of 2 cm on the forearm). Under proper conditions, only one pulse is felt, for example, half way between two contact locations in the case of just two contactors.

Cutaneous rabbit
Two separate locations stimulated multiple times in quick succession feels like a “rabbit”, hopping across the skin between the two locations The illusion was recently investigated with fMRI (Blankenburg et al., 2006), who showed that activity in the primary somatosensory cortex representing the middle location was just as high for the cutaneous rabbit as compared to actual stimulation at that point

Also needs `vibrotactors' causing short pulses (a few milliseconds) at discrete locations on the skin (of the order to 10 cm separation on the arm), but this time their ring must be spread through time at intervals of a few tens of milliseconds, typically in one burst of ve pulses at one location, then another ve at the next location and so-on. What is felt is a progression of pulses on the path from one location to the next. In that, it can be viewed as a kinetic variant of the funneling illusion. Since then, truly many variations have been investigated including two-dimensional variants induced through a electro-cutaneous stimulation . Relationships, or lack thereof, with visual illusions were discussed in terms of the phi e ffect (apparent movement) and tau eff ect (apparent distance reduction).
Distance Misjudgment : Size-constancy failure
Originally described by Weber, distances on the face feel bigger than distances on the back (~80% of times); distances on the index finger feel bigger than on the forearm (77%), back (70%), & middle finger (63%) But, these illusions are much smaller than predictions based on receptor density, homunculus proportions, or spatial acuity, suggesting a tactile size-constancy mechanism

Pattern & movement illusions
Comb illusion
Your fingertips are among the most sensitive parts of your body, and this makes them surprisingly easy to fool. Take an ordinary comb and pencil and lay your index finger along the top of the comb, then run the pencil back and forth along the side of the teeth. Even though the teeth are moving from side to side in a wave-like motion, your finger will feel as if a raised dot is travelling up and down the comb.
According to Hayward, this works because the unfamiliar motion of the teeth causes similar skin deformation to the more usual action of running your finger over a raised bump, so your brain interprets it that way.
*vision must be blocked
Fishbone illusion
Rubbing the fi nger along the strip results in a sensation where the surface is no longer flat. Several variants obtained by manufacturing surfaces with non-uniform adhesion properties. http://lsc.univ-evry.fr/~eurohaptics/upload/cd/papers/f46.pdf
Velvet hand illusion
Perception of simulated local shapes using active and passive touch
http://www.cim.mcgill.ca/~haptic/pub/AS-ET-AL-JNP-09.pdf
- There is now considerable evidence indicating that both cutaneous and proprioceptive inputs are
gated, or suppressed, during active movements
- For the shapes generated by the lateral force fields, it appears that active movement was needed to interpret these
otherwise ambiguous shapes.
- For those shapes generated by the displacement field, in contrast, there was
evidence for a superiority of passive touch over active touch.
- presence of active movement-related suppression of the sensory inputs modulating the perception of these shapes, and so diminishin performance during active touch
- The gating of afferent signals to somatosensory cortex during active movement is a prime
example of this efference copy
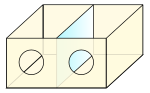
Virtual haptic object perception
When we slide a fingertip along the surface of an object, the geometry of the surface determines the way our finger will move. For example, if the object has a bump on it, our finger will ascend into the bump and then descend from it.
Until very recently, it was assumed that we used such geometrical information to perceive the shape of an object. However, there are other sources of shape information that are also experienced when touching an object. These are the forces that we experience when exploring the object. For example, when sliding the fingertip along a surface with a small bump, the bump will resist the movement of the fingertip. Such resistance forces are largely determined by the local geometry of an object and by how much force we apply when exploring the object.

When the haptic interface is powered on, it generates computer-controlled forces. Such forces are added to the forces that arise naturally from the normal tool-surface interaction. In this manner, it is feasible to create normally impossible, paradoxical objects in which geometrical information conflicts with force information. Figure 1 presents one of these impossible objects. Here, a person is exploring and object with a real, physical hole object (Figure 1, gray bar). Normally, the person would simultaneously experience forces that are related to the geometry of the hole, as in the normal case described before. However, in this impossible object, the haptic interface modifies such forces, so that the person experiences forces that are normally associated with an object that has a bump on it (Figure 1, red dotted line). Here the bump is purely virtual: it is created with forces, and has no geometrical information of its own. That is, when exploring this object, the person's fingertip still follows the hole trajectory given by the plastic surface (gray bar in Figure 1). The end result is that the person experiences the geometrical information of a hole, together with the force information of a bump.
Surprisingly, people's perception depended on the forces they experienced, and not on the geometrical information they simultaneously received. That is, in the case shown in Figure 1, subjects typically perceived a surface with a haptic bump (created through forces alone), and not a surface with a haptic hole, even though there was a real physical hole present. This can be considered as a touch illusion, in which a conflict between sources of information is resolved in favor of force cues, perhaps by weighing each source of information differently
Why is hard tickle yourself ?
Try tickling yourself on the palm of your hand and notice how it feels. It might feel a little ticklish. Now, ask a friend to tickle you in the same place and note the difference. This time, it tickles much more.
Bottom line: When their brains expected a tap and the tap came as expected, the brain noticed it less.
How it works When you experience a sensation or generate an action, how do you know whether it was you or someone else who caused it? After all, there is no special signal from the skin receptors to tell you that it was generated by you or by something in the environment. The sensors in your arm cannot tell who's stimulating them. The brain solves this problem using a prediction system called a forward model. The brain's motor system makes predictions about the consequences of a movement and uses the predictions to label sensations as self-produced or externally produced.
Every time an action is made, the brain generates an efference copy of the actual motor command in parallel. The efference copy is just like a carbon copy, or duplicate, of the real motor command and is used to make a prediction about the effect of the action, for example, the tickling effect of a finger stroke. The predicted sensory effect of the efference copy and the actual sensory effect of the motor command are compared . If there is a mismatch, the sensation is labeled as externally generated.

Force Prediction You can see how we anticipate a stimulus and compensate for it, by attempting to estimate a force and seeing whether you can get that right. In action
Use your right index finger to press down gently on the back of a friend's hand. Your friend should then use her right index finger to press down on the same spot on your hand with the same force that she felt from your finger press. Continue taking turns at this—reproducing the same force each time—and you may notice that after about 10 turns, the forces of your finger presses are getting stronger. How it works
This predictive process may also be at the root of why physical fights tend to escalate. Notice how tit-for-tat tussles between children (or indeed brawls between adults) intensify, with each person claiming that the other hit him harder. In a recent study,3 a motor was used to apply a brief force to the tip of each participant's left index finger. Participants were then asked to match the force they felt using their right index finger to push down on their left index finger through a force transducer.
Results showed that participants consistently applied a stronger force than that which was applied to them. The authors suggest that, just as when we try to tickle ourselves, the brain predicts the sensory consequences of the self-generated force and then reduces the sensation. We can only predict the outcome of our own actions and not of someone else's, so an externally generated force feels more intense. As a result, if you were to deliver a vengeful punch to match the force of your opponent's blow, it is likely that you would overestimate the strength of the opponent's punch and strike back harder.
Why have we evolved the inability to tickle ourselves? The force generation experiment shows that sensations that are externally caused are enhanced. Similarly, our reactions to tickling may have evolved to heighten our sensitivity to external stimuli that pose a threat. Our sensory systems are constantly bombarded with sensory stimulation from the environment. It is therefore important to filter out sensory stimulation that is uninteresting—such as the results of our own movements—in order to pick out, and attend to, sensory information that carries more evolutionary importance, such as someone touching us. When a bee lands on your shoulder or a spider climbs up your leg, the brain ensures that you attend to these potentially dangerous external stimuli by ignoring feelings from your own movements. The predictive system therefore protects us and tickling may just be an accidental consequence.
Aristotle's illusion
- One of the oldest tactile illusions
- (also called 'tactile diplopia' or 'tactile diplesthesia')
- two fingers are crossed over, and an object is placed, tapped, or rubbed between them.
- Many people feel two distinct sensations (objects) in separate locations, rather than one
- This also works if you touch your nose.


This is an example of what is called “perceptual disjunction”. It arises because your brain has failed to take into account that you have crossed your fingers . Because the pea (or nose) touches the outside of both fingers at the same time - something that rarely happens - your brain interprets it as two separate objects.
- tactile,proprioreception - reference frame
Weight illusions
Size-weight
When lifting two boxes of equal weight but of di erent sizes, the greatest majority of people are convinced that the smaller boxes are heavier than the bigger.
- Opposite Perceptual and Sensorimotor Responses to a Size-Weight Illusion http://jn.physiology.org/content/95/6/3887
Temperature-weight
Objects of equal weight felt heavier when they felt cold than when they felt warm
Barbie/Ken Illusion
Many factors influence perceived weight, including the sex of toy dolls.
- Males are perceived as bigger than females, leading to a size-weight illusion when lifted
Material-weight
Metal containers feel lighter than wooden containers of the same size and mass
The expected weight or density can be measured by matching visible and hidden weights, lifted in the same manner. This gives an expected density of about 1.7 for metal canisters and 0.14 for polystyrene blocks. Density expectations may assist in selecting suitable objects to throw.
Color-weight
Darker objects feel lighter than brighter objects of the same size and mass
Stroop-like effects
The label 'heavy' makes object 'feel' heavier
Perceived effort
Wearing a rucksack makes hills seem steeper
Body-part temporal order failures
There was a correlation associated with location on the body where tactile stimuli are applied and the judgement of the order in which they occurred.
Judgement of the temporal ordering of taps in the bilateral condition was reversed from the mere fact of crossing one's arms, and furthermore found that the eff ect could be cancelled when holding sticks that crossed to `undo' the crossing of the arms! . This fnding raises new questions regarding the brain mechanisms responsible for temporal ordering of events and body representations.
Tactile numerosity failure
In vision, we can immediately 'count' (subitise) up to three or four separate items. More than this, we have to count them explicitly Gallace et al. (2006) showed that the same phenomenon exists for vibrations distributed across the body, but we can only subitise two vibrations
Heat grill illusion
Its burning sensation while putting hand on the grill where both coils are entwined. While the cool coil isn't colder than 10ºC and the warm coil not warmer than 40ºC. Generally, cold doesn't feel painful. If it does, it feels like burning. The skin sends two components of cold to the brain: the temperature and the quantity of pain. However, the nerves that transmit the cold temperature information suppress the nerves that transmit the pain. That's why cold normally feels cold, but not painful. But, when cold is mixed with warmth, the average temperature the skin measures, is warmer, and the nerves which forward cold, pass on less cold information. Because of this these nerves no longer inhibit the pain signals and therefore you experience pain.
more info: Thunberg's (1896) thermal grill evokes a burning, ice-like pain sensation with interlaced innocuous warm (40 °C) and cool (20 °C) bars. A similar, albeit stronger, sensation is elicited by pouring warm water on feet that are numb with cold (an unmistakable signal of thermoregulatory distress), and only burning pain is evoked by a cool stimulus (<24 °C) when A-fibre conduction (and normal cool sensation) is blocked by pressure on a peripheral nerve. These demonstrations reveal two basic phenomena: the increasing activation of the polymodal C-nociceptive sensory channel by cold below a threshold of approx24 °C (the normal thermoneutral ambient temperature), and the central inhibition of that activity by innocuous thermosensory activity ('cold inhibits pain').
The burning pain sensation caused by polymodal C-nociceptors (HPC), which are sensitive to noxious heat and pinch, as well as to cold, is normally masked centrally by the activity of the specific cutaneous Adelta-fibre thermoreceptors that are responsible for the sensation of cooling. When the activity of cooling receptors is reduced, the polymodal nociceptive activity that is evoked by cooling is disinhibited centrally and causes a burning sensation at cool (<24 °C) temperatures that is normally felt only at noxious cold (<15 °C) temperatures.
The thermal-grill illusion can be explained physiologically by an unmasking of the cold-evoked activity of polymodal nociceptive lamina I spinothalamic neurons (which are selectively activated by polymodal C-nociceptors) due to the reduction of the normal cold-evoked activity of thermoreceptive lamina I spinothalamic neurons (which are selectively activated by Adelta-type cooling thermoreceptors) by spatial summation of the simultaneous warm stimuli in the thermoreceptive but not the nociceptive neurons. The grill effectively produces a relative balance of polymodal and thermosensory activity similar to that caused by a noxious cold stimulus of approx 10°C; the equivalence of these sensations has been verified psychophysically. Reduction of activity in the thermoreceptive sensory channel disinhibits or unmasks the polymodal nociceptive channel at thalamocortical levels, producing a burning pain sensation.
Functional imaging has confirmed that the thermal grill produces a pattern of activity in the cortex that is identical to the activation produced by noxious cold. The cortical activation unmasked by the grill is in the anterior cingulate cortex (ACC), indicating that ACC activation is selectively associated with the perception of thermal pain — that is, the affect that signals thermoregulatory distress. So, the thermosensory activity in the lamina I spinothalamocortical pathway to interoceptive cortex unmasks activity in the medial lamina I pathway, which activates the ACC and is associated with burning pain. This indicates that the medial thalamic lamina I spinothalamic tract projection to the mediodorsal thalamic nucleus (ventral caudal part, MDvc) might be the crucial site for the inhibition of thermal pain by cold; this suggestion is supported by preliminary physiological recordings from the MDvc in our laboratory.

Abstract Differential A-fibre block of human peripheral nerves changes the sensation evoked by innocuous cooling (similar to 24 degrees C) of the skin from 'cold' to 'hot' or 'burning', and this has been attributed to activity in unidentified unmyelinated fibres that is normally masked or inhibited by activity in A delta cold fibres. Application of the TRPM8 agonist menthol to the skin evokes 'burning/stinging' as well as 'cold', and the unpleasant sensations are also enhanced by A-fibre block. In this study we used microneurography to search for C fibres in human skin activated by cooling and menthol, which could be responsible for these phenomena. Afferent C fibres were classified by activity-dependent slowing as Type 1A (polymodal nociceptor), Type 1B (mechanically insensitive nociceptor) or Type 2 (cold sensitive), and their responses to heating and cooling ramps were measured before and after topical application of menthol preparations (2-50%). The only C fibres activated by menthol were the Type 2 fibres, which discharged vigorously with innocuous cooling and were strongly activated and sensitized to cooling by menthol. Unlike an A delta cold fibre, they continued to discharge at skin temperatures down to 0 degrees C, and most (13/15) were also activated by heating. We propose that the Type 2 C fibres, although resembling A delta cold fibres in their responses to innocuous cooling and menthol, have a more complex sensory function, colouring with a 'hot-burning' quality the perceptions of low and high temperatures. Their bimodal thermoreceptive properties may help account for several puzzling psychophysical phenomena, such as 'innocuous cold nociception', 'paradoxical heat' and the thermal grill illusion, and also for some neuropathic pains.
Thermoelectric; Tactile display http://talorongilad.com/tag/thermal-grill-illusion-thermoelectric-tactile-display/
Acute peripheral pain is reduced by multisensory interactions at the spinal level http://www.smbs.buffalo.edu/acb/neuro/readings/TouchChangePain.pdf
Teplota
- adaptace
- citlivost změny 0,1
- We are more sensitive to temperature changes when our skin is warmer or cooler than the normal range (32-34C)
- We are more sensitive to temperature changes when a larger area of skin is warmed or cooled
Shrink your Pain
If you looked at their wounded hand through wrong end of the binoculars, making the hand appear smaller, experienced significantly less pain and decreased swelling. According to the researchers, this demonstrates that even basic bodily sensations such as pain are modulated by what we see. So next time if you stub your toe or cut a finger, do yourself a favor, look away!

Pseudo-Haptic Ef ects
The common thread behind these ef ects is that, in the proper conditions, visual cues can create haptic sensations that have no basis in the physical mechanical signals experienced by the subject. For example, when sliding a computer mouse on a smooth and uniform surface, if the velocity of the cursor relatively to that of the mouse is modulated as a function of its location on the screen in correlation with seen items, haptic sensations such as viscosity or shape are typically experienced . F6h_19PxKO8 http://www.ifeelpixel.com/download/
Snímaný pohyb ruky je převeden na přesně opačný pohyb na obrazovce
- Signály
- vizualní a propriorecepce(vnímání polohy)
- Pravidla
- pro tento úkol je duležitější zrak než propriorecepce
- (možná by byla jiná situace kdyby se rukou hýbalo dopředu a dozadu pak by mohla byt duležitější propriorecepce)
- Integrace
- vnímáme pouze obraz propriorecepce se vypne /není zahrnuta do integrace protože je přesně opačná není způsob jak to složit
After-effects
Muscular/postural after-effects
It is an old observation that non-volitional arm abduction movements accompanied by a sensation of arm lightness often occur as an after-effect following forceful voluntary arm abductor contractions against a restraint.
After-contractions are induced by activity in primary muscle spindle afferents as a consequence of thixotropic properties of intrafusal muscle fibres. Central excitability changes following the conditioning voluntary effort may contribute to the phenomenon.
Postural after-contractions in man attributed to muscle spindle thixotropy http://jp.physoc.org/content/506/3/875.full.pdf
Subject, standing in a doorway, abducts his arms for a while forcefully against the door posts; when he then relaxes and lets the arms slowly return to their initial position he experiences a transient sensation of lightness while the arms start to rise again due to a non-volitional contraction of the arm abductor muscles.
Weight after-e ffect
Shape after-e ffect
It can be demonstrated with salad bowls large enough to contain the hand. For instance, once having experienced the concavity of a bowl for about 10 seconds by statically pressing the hand inside it, a at surface will feel convex for a few seconds.
Tactile after-e ffect
Vision after-e ffect
Motion after-e ffects - waterfall illusion
Auditory after-e ffect
Cross-modality numerosity e ffects
Cross-modality numerosity eff ects seem to occur for touch as much as they do for vision and audition.
Double flash
If two tactile taps or beeps delivered within a 60 millisecond interval observers would see two fashes when only one was produced,
Phantom tap
- tap somebody's skin once while at the same time playing two or three closely spaced electronic beeps. They will feel two or three taps.
- of the order of a few tens of milliseconds
Proprioreceptive ilusions
- In the absence of movement & visual feedback, the perceived location of our hand may 'drift'
- This drift may be due to the information available from proprioception degrading over time
- usefull for WILD and OOBE project
- Vibrating the tendons of a muscle (at about 100-120Hz) mimics signals arising from normal muscle stretch
- This can 'fool' the brain into thinking that the muscle is being stretched
- pics body parts vibration treesholds and receptor frequenci sensitivity
Proprioreception
Sense of body movement and position in space
- Muscle spindle -passive, static, & dynamic muscle stretch
- Goldi tendon organs -tendon
- Joint receptors are fast-adapting and signal joint angle
- In the absence of movement & visual feedback, the perceived location of our hand may 'drift'
- This drift may be due to the information available from proprioception degrading over time
- usefull for WILD and OOBE project
Tendon and spindle model
Propriroceptive laterization
The nondominant arm (the left for most people) was better at matching positions. Furthermore, the left arm/right brain superiority grew with the difficulty of the task.When visual cues were provided. As expected, the dominant arm excelled, but when only proprioception was allowed, the nondominant arm won every time.
Various vibrations inducted illusions
- Vibrating the tendons of a muscle (at about 100-120Hz) mimics signals arising from normal muscle stretch
- This can 'fool' the brain into thinking that the muscle is being stretched
- pics body parts vibration treesholds and receptor frequenci sensitivity


For example, vibration of the biceps brachii of the arm leads to the forearm feeling more extended than it actually is .When postural muscles are vibrated, various illusions of body motion can be elicited. For example, simultaneous vibration of the Achilles tendons of a standing subject restrained in position will cause the subject to experience forward pivoting in pitch about the ankles. The subject, if in total darkness, will exhibit nystagmoid eye movements with the slow phase compensatory for the direction of apparent self-displacement. If a visual target is presented for the subject to fixate, it will be seen to move in the direction of apparent self-motion and to displace ahead of the subject in the same direction . Thus, the visual target motion has the same characteristics as the oculogyral illusion described above,and a similar physiological explanation in terms of suppression of involuntary eye movements can account for its properties.Vibration of neck muscles leads to illusions of head rotation and displacement In fact, with vibration of the appropriate skeletal muscles, apparent motion and displacement of the body or its segments can be elicited in virtually any desired configuration. If visual or auditory targets are present, their positions also are remapped in the direction of apparent body motion and displacement.For example, when a small target light is attached to the hand and illusory motion of the restrained forearm is elicited by vibration of the biceps brachii or triceps muscles, the target light will be seen to displace physically in the direction of the apparent motion of the hand. This phenomenon is known as the oculobrachial illusion .


Pinocchio’s Effect
- gently stroking both noses,after about 1 minute, more than 50% of the subjects report their nose as incredibly long

- Vibrator version
- vibrator is applied to the biceps tendon while one holds one’s nose with the hand of that arm. The vibrator stimulates muscle spindles in the biceps that would normally be stimulated by the muscle’s stretching, creating a kinesthetic illusion that the arm is moving away from the face. Because the fingers holding the nose are still giving tactile information of being in contact with the nose, it appears that the nose is moving away from the face too, in a form of perceptual capture. Similar phenomenon happens using the blindfolded method.
Spatial Aaudirory + Visual illussions
- zvuk je posunut do místa kde se v obrazu neco deje - otvírání pusy břichomluvesctvý
Temporal : Audiroty + Visual illussions
- Two visual stimuli appear to be further apart in time if an auditory stimulus comes about 75ms before and after the visual stimuli
- A75 V75 V75 A
- MSI = V 125ms V
Mutimodal Interaction
Audiroty + Visual itegration
McGurk effect
G-lN8vWm3m0
Auditory + Tactile itegration
Smooth blackboard
If you happen to have a blackboard and some earplugs handy, try this out. Write something on the board, then rub it out and write it again wearing earplugs (or, better still, noise-cancelling headphones). The board will feel much smoother when you can't hear the chalk squeaking across its surface, even though it is the same board and the same chalk.
"Parchment-skin" illusion
the sound made by rubbing the hands against each other is picked up by a microphone, the high-frequencies are enhanced, and the result given to the perceiver through headphones. The result is a modied sensation of skin roughness/smoothness or dryness/moisture. This type of illusory perception has practical implications for everyday life such as during food appreciation
- třeni rukou -zesíleny visoké frekvence
- ruky se zdaji jako sušši a drsnější
Auditory + Gustatory itegration
- křupavost bramburku ovlivněna zvukem
Vision + Tactile itegration
Vision interacts with touch in the perception of size, texture, sti ness and probably most other object attributes .
When one cuts into some soft wood with a knife under a strong magnifying glass, the resulting visual enlargement gives rise to the impression that one is cutting deeply into a soft mass, such as cork
Crossing your arms relieves hand pain

w6e38gWjljo
Crossing your arms over the midline (an imaginary line running vertically down the centre of the body) confuses the brain and reduces the intensity of the pain sensation.
Scientists believe that the reason for this phenomenon is due to conflicting information between two of the brain’s maps – the one for you body and the one for external space.
As your left hand usually performs actions on the left side of space (and vice-versa for the right side), these two maps are used to working together to produce strong impulses in response to stimuli. When our arms are crossed, the two maps are mismatched and processing of noxious information is weakened – resulting in less pain.
Ames room
YjmHofJ2da0 Ttd0YjXF0no
Hollow mask illusion
cN8plJyT0As
Dragon illusion
PKeuhXQj3MM QW3E-ZMv5zI
Sinaestezia
Synestezie: přehled současných poznatků http://www.psychiatriepropraxi.cz/pdfs/psy/2010/04/05.pdf
v8L4xPKeFSw (3.30 - end)
BBC Horizon:Synaesthesia 4297264301326388608
Bouba/kiki effect
Holophonic-Virtual Barber Shop
IUDTlvagjJA
Vestibular ilusions
Vection effect is lower with red color
7rm3Yk89gjk
 http://ispace.iat.sfu.ca/project/pathintyawpitch/
http://ispace.iat.sfu.ca/project/pathintyawpitch/
Illusions links
Visual Phenomena & Optical Illusions
Demonstrations of Auditory Illusions
Is Seeing Believing - BBC Horizon in video: McGurK effect, hollow mask illusion ,color preception, Sinaestezia ,color/taste/smell itegration , hearing/taste integration, rubber hand illusion, human echolocation, tactile navigation o3g66FRUYww
Neuroscience for kids :
See through your own hand Roll up a piece of notebook paper into a tube. The diameter of the tube should be about 0.5 inch. Hold up your left hand in front of you. Hold the tube right next to the bottom of your left “pointer” finger in between you thumb (see figure below).

